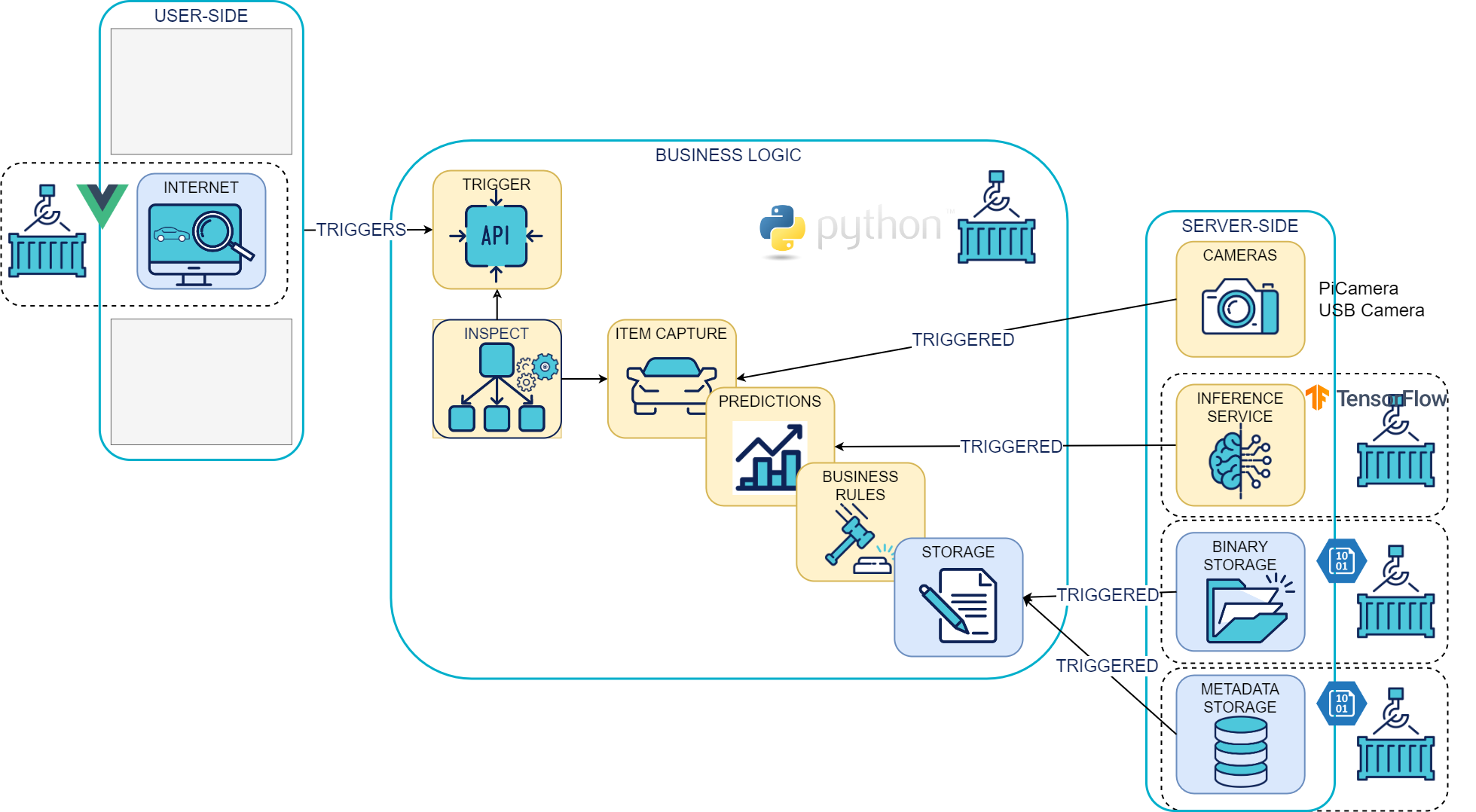
Edge Orchestrator
The edge_orchestrator orchestrates the following steps as soon as it is triggered:
- image capture
- image backup
- metadata backup
- model inference on images
- saving results
Set up your development environment
To facilitate the installation of the development environment, a Makefile automates tasks:
$ make
❓ Use `make <target>'
conda_env 🐍 Create a Python conda environment
dependencies ⏬ Install development dependencies
tests ✅ Launch all the tests
unit_tests ✅ Launch the unit tests
integration_tests ✅ Launch the integration tests
functional_tests ✅ Launch the functional tests
pyramid ⨺ Compute the tests pyramid
pyramid_and_badges 📛 Generate Gitlab badges
** Python interpreter installation **
The project uses conda to manage Python virtual environments Miniconda installation guide.
** Install conda on MacOS **
The most direct way to install conda is still Homebrew:
brew update
brew install --cask miniconda
** Initialize the project environment **
Once Miniconda is installed, create the Python virtual environment and install its dependencies using the Makefile:
cd edge_orchestrator
make conda_env
** Install project dependencies **
make dependencies
** Setuptools "editable mode" **
To be able to benefit from Python packaging without being impacted during local development (i.e. without having to rebuild a package each time it is updated), we use the editable mode (see the official pip doc).
pip install -e .
During the installation of the development environment, the above command will have the following effect:
A file edge_orchestrator.egg-link was created in the edge_orchestrator virtual environment with the following content:
cat /usr/local/Caskroom/miniconda/base/envs/edge_orchestrator/lib/python3.9/site-packages/edge_orchestrator.egg-link
/path/to/project/sources/vio_edge/edge_orchestrator
Thus, thanks to the egg-link, the python module edge_orchestrator is properly installed as a library in the virtual environment, but does not require regular repackaging after an update in local.
** Setuptools "development mode" **
To be able to install the library and its development dependencies (test libraries):
pip install -e ".[dev]"
** Setuptools "console_scripts" EntryPoints **
In the edge_orchestrator.egg-link file of the edge_orchestrator, the following entry_points block is configured
setup(
name="edge_orchestrator",
# [...]
entry_points={
'console_scripts': [
'edge_orchestrator = edge_orchestrator.__main__:main',
],
},
)
The setuptools package allows you to configure different types of scripts, including console_scripts, which will generate a "shim" shell script that will be placed on the PATH and will call the edge_orchestrator.main:main function as configured.
This edge_orchestrator edge_orchestrator is located in the virtual environment created during project installation.
When the virtual environment is activated (by running conda activate edge_orchestrator), the $PATH environment variable is configured to point to the bin/ folder of the virtual environment.
$ echo $PATH
/usr/local/Caskroom/miniconda/base/envs/edge_orchestrator/bin:[...]
If we look inside this script, we notice that it is responsible for importing our edge_orchestrator module and calling its entry point.
#!/usr/local/Caskroom/miniconda/base/envs/edge_orchestrator/bin/python3.9
# EASY-INSTALL-ENTRY-SCRIPT: 'edge_orchestrator','console_scripts','edge_orchestrator'
import re
import sys
# for compatibility with easy_install; see #2198
__requires__ = 'edge_orchestrator'
from pkg_resources import load_entry_point
[...]
if __name__ == '__main__':
sys.argv[0] = re.sub(r'(-script\.pyw?|\.exe)?$', '', sys.argv[0])
sys.exit(load_entry_point('edge_orchestrator', 'console_scripts', 'edge_orchestrator')())
For more information, the documentation can be found here.
Tests
To run all tests:
make tests
To run only unit tests:
make unit_tests
API Routes
All routes are prefixed with api/v1. For example, to retrieve the list of items locally, use this url: http://localhost:8000/api/v1/items
You can also refer to the API swagger on the /docs url: http://localhost:8000/docs
Add a new configuration
All the JSON config files are in edge_orchestrator/config/station_configs
If you want to create a new config, you need to add a new JSON in the above directory.
Here's a template of a config file.
{
"cameras": {
"camera_id3": {
"type": "fake" #type of the camera : fake, pi_camera or usb_camera
"input_images_folder": "people_dataset",
"position": "front",
"exposition": 100,
"models_graph": {
"model_id1": {
"name": "mobilenet_ssd_v2_coco", #name of the model
"depends_on": [], #if this model depends on another model, if none then empty list
"class_to_detect": ["cell phone"] #class to detect, always in list format and only for object detection model. If classification model, can delete this row
},
"model_id6": {
"metadata": "cellphone_connection_control",#name of the model
"depends_on": [
"model_id1"
], #the model_id6 depends on the model_id1
"class_to_detect": ["connected"]
}
},
"camera_rule": {
"name": "min_nb_objects_rule", #name of the camera rule
"parameters": {
"class_to_detect": ["person"], #always a list
"min_threshold": 1
}
}
},
"camera_id2": { # if there's another camera, if not you can delete this section, if there's a third then add one.
"type": "fake",
"input_images_folder": "people_dataset",
"position": "front",
"exposition": 100,
"models_graph": {
"model_id1": {
"name": "mobilenet_ssd_v2_face",
"depends_on": [],
"class_to_detect": ["face"]
}
},
"camera_rule": {
"name": "min_nb_objects_rule",
"parameters": {
"class_to_detect": ["face"],
"min_threshold": 1
}
}
}
},
"item_rule": {
"name": "min_threshold_ko_rule", #the item rule name
"parameters": {
"threshold": 1
}
}
}
The comments are only here to guide you, you should delete them in your new json config.
| Station config : Camera | Description |
|---|---|
type |
Camera type can be fake, pi_camera and usb_camera. pi_camera will be used for raspberry deployment. usb_camera is used when it is required to find a camera or webcam connected to the edge. A fake camera will not capture image but pick a random .jpg or .png file in the folder pointed by the "input_images_folder" parameter, which will be located in edge_orchestrator/data/ |
input_images_folder |
Used with fake cameras, is the path to the folder from which the pictures are taken. |
position |
Used for metadata, purpose of saving the camera parameters in the future |
exposition |
Used for metadata, purpose of saving the camera parameters in the future |
models_graph |
Pipeline of models used during inference. Dictionary of models, containing their names, depencecies to other models and all its possible parameters. |
camera_rule |
Dictionary, key name containing the rule name and key parameters containing the selected rule's inputs |
For the item rules, just inform the rule's name and parameters as a dictionary of the inputs.
Add a new model
-
All our models are in tflite format. In order to add an already trained model in the
flite_servingfolder. Inside this folder should be the .tflite model and if needed a .txt file with the labels/class names. -
You also need to add this model in the inventory located in
edge_orchestrator/config/inventory.jsonunder themodelscategory. - Classification model
"your_new_model_name": { "category": "classification", "version": 1, "class_names": [ "class name 1", "class name 2", ... ], "image_resolution": [ x resolution for your trained model (int), y resolution for your trained model (int) ] } -
Object detection model ``` "your_new_model_name": { "category": "object_detection", "version": 1, "class_names_path": "{name of file with the class names}.txt", "output": { "boxes_coordinates": "{name of the boxes_coordinates variable in your model}", "objectness_scores": "{name of the objectness_scores variable in your model}", "number_of_boxes": "{name of the number_of_boxes variable in your model}", "detection_classes": "{name of the detection_classes variable in your model}" }, "image_resolution": [ x resolution for your trained model (int), y resolution for your trained model (int) ], "objectness_threshold": minimum threshold score for an object to be detected (float)
} ```
| Model parameters | Description |
|---|---|
category |
Model's category, can be object_detection, classification or object_detection_with_classification |
version |
Model's version, used in the API link, should be 1 mais c'est pas utilisé |
model_type |
Type of model used, is Mobilenet or yolo. Mobilenet models return boxes as [ymin, xmin, ymax, xmax] and Yolo as [x_center, y_center, width, height] |
image_resolution |
List of ints corresponding to the x.y image size ingested by the model |
depends_on |
Used to design model pipelines, is a list of models' names |
class_names |
List of the label names as a list of strings |
class_names_path |
Path to the labels files, the file should be located under the edge_orchestrator/data folder |
class_to_detect |
List of label names that will be detected (for Mobilenet) |
output: detection_boxes |
For detection models, name which will be given to the predicted boxes |
output: detection_scores |
For detection models, name which will be given to the predicted scores |
output: detection_classes |
For detection models, name which will be given to the predicted classes |
output: detection_metadata |
For detection models, name which will be given to the predicted metadata |
objectness_threshold |
Score threshold under which an object won't be detected |
Add new camera rule
In order to make a final decision i.e the item rule, we first need camera rules. Each camera gets a rule.
- Each rule is in a distinct file located in edge_orchestrator/edge_orchestrator/domain/model/business_rules/camera_business_rules
It's in this method that's the camera rule will be described.
The method only takes the inference in argument.
- You also need to precise the camera rule in the station config in
edge_orchestrator/config/station_configs/
"camera_rule": {
"name": "name of the rule",
"parameters": {
# parameters of the rules for example :
"expected_label": ["connected"]
}
}
- You need to add the new rule in the
get_camera_rulefunction located inedge_orchestrator/edge_orchestrator/domain/model/camera.pywhich get the good method from the name of the camera rule in the station config file.
Add new item rule
This is to make a final decision i.e the item rule. Each station config gets an item rule (only one).
- Each rule is in a distinct file located in edge_orchestrator/edge_orchestrator/domain/model/business_rules/item_business_rules
It's in this method that's the item rule will be described.
The method only takes the camera decisions in argument.
- You also need to precise the item rule in the station config in
edge_orchestrator/config/station_configs/
"item_rule": {
"name": "name of the item rule",
"parameters": {
# parameters of the rules for example :
"threshold": 1
}
}
- You need to add the new rule in the
get_item_rulefunction located inedge_orchestrator/edge_orchestrator/domain/model/item.pywhich get the good method from the name of the item rule in the station config file.
The camera and item rules are called in the edge_orchestrator method edge_orchestrator/edge_orchestrator/domain/use_cases/edge_orchestrator.py
in the apply_business_rules function.
Adapters description
Binary storage adapter
When an image is captured by any camera, VIO is saving the image in a storage. The binary storage adapter is responsible
this process. 4 binary storage systems are implemented in VIO:
- File System Binary Storage: Saves the image in the filesystem under the VIO/edge_orchestrator/data/storage folder.
- Memory Binary Storage: Saves the image in memory as a dictionary.
- Azure Container Binary Storage: Saves the images in an Azure Blob Storage container.
- GCP Binary Storage: Saves the images in a Google Cloud Storage bucket.
Theses adapters are implemented in the edge_orchestrator/edge_orchestrator/infrastructure/binary_storage folder and
the base mock class is defined edge_orchestrator/edge_orchestrator/domain/ports/binary_storage.py.
Camera adapter
The camera adapter is responsible for localizing the connected cameras and capturing images, 3 camera systems are
implemented in VIO and are chosen in the model configuration:
- Fake Camera: Picks a random .jpg or .png file in the folder pointed by the "input_images_folder" parameter,
which will be located in edge_orchestrator/data/
Theses adapters are implemented in the edge_orchestrator/edge_orchestrator/infrastructure/camera folder and the base
Camera class from which the adapters inherit is defined in edge_orchestrator/edge_orchestrator/domain/models/camera.py.
Inventory adapter
Used to store the configuration settings. One adapter is available for json configuration files. - Json Inventory: Reads the configuration from a json file.
This adapter is implemented in the edge_orchestrator/edge_orchestrator/infrastructure/inventory folder and the base
mock Inventory class is defined in edge_orchestrator/edge_orchestrator/domain/ports/inventory.py.
Metadata storage adapter
When a task is done, the configuration and the results are saved in a metadata storage. An example of the stored data is shown below:
Metadata json
"serial_number": "serial_number",
"category": "category",
"station_config": "yolo_coco_nano_with_1_fake_camera",
"cameras": {
"camera_id4": {
"brightness": null,
"exposition": 100,
"position": "back",
"source": "people_dataset"
}
},
"received_time": "2024-04-02 11:22:12",
"inferences": {
"camera_id4": {
"model_id4": {
"object_1": {
"label": "person",
"location": [
0.2731,
0.1679,
0.5308,
0.9438
],
"score": 0.9098637104034424,
"metadata": null
},
"object_2": {
"label": "person",
"location": [
0.1099,
0.351,
0.2252,
0.6945
],
"score": 0.559946596622467,
"metadata": null
}
}
}
},
"decision": "OK",
"state": "Done",
"error": null,
"id": "03a7adc7-59d5-4190-8160-4a71fd07cac5"
4 metadata storage systems are implemented in VIO:
- File System Metadata Storage: Saves the metadata in the filesystem under the VIO/edge_orchestrator/edge_orchestrator/data/storage folder.
- Memory Metadata Storage: Saves the metadata in memory as a dictionary.
- Azure Container Metadata Storage: Saves the metadata in an Azure Blob Storage container.
- GCP Metadata Storage: Saves the metadata in a Google Cloud Bucket.
- MongoDB Metadata Storage: Saves the metadata in a MongoDB database.
Theses adapters are implemented in the edge_orchestrator/edge_orchestrator/infrastructure/metadata_storage folder and
the base mock class is defined edge_orchestrator/edge_orchestrator/domain/ports/metadata_storage.py.
Model forward adapter
The model forward adapter is responsible for the model inference, it performs the inference with the required post and pre-processing. 5 model forward systems are implemented in VIO: - Fake Model Forward: Returns a random inference result. - TF Serving Wrapper: Redirect the prediction task to one of the 3 following Tensor Flow model forwarders. - TF Serving Detection Wrapper: Performs the inference with a detection model. - TF Serving Classification Wrapper: Performs the inference with a classification model. - TF Serving Detection and Classification Wrapper: Performs the inference with a detection and classification model.
Theses adapters are implemented in the edge_orchestrator/edge_orchestrator/infrastructure/model_forward folder and
the base mock class is defined edge_orchestrator/edge_orchestrator/domain/ports/model_forward.py.
Station config adapter
Used to store the station configuration settings. One adapter is available for json configuration files.
This adapter is implemented in the edge_orchestrator/edge_orchestrator/infrastructure/station_config folder and the base
mock StationConfig class is defined in edge_orchestrator/edge_orchestrator/domain/ports/station_config.py.
Telemetry sink adapter
Sends the telemetry data to a sink for further processing and analysis. 3 telemetry sink systems are implemented in VIO: - Fake Telemetry Sink: Does nothing. - Azure Telemetry Sink: Sends the telemetry data to an Azure IoT Hub Module. - Postgresql Telemetry Sink: Sends the telemetry data to a Postgresql database.
Theses adapters are implemented in the edge_orchestrator/edge_orchestrator/infrastructure/telemetry_sink folder and
the base mock class is defined edge_orchestrator/edge_orchestrator/domain/ports/telemetry_sink.py.